|
Для автомобілів із паркувальним автопілотом
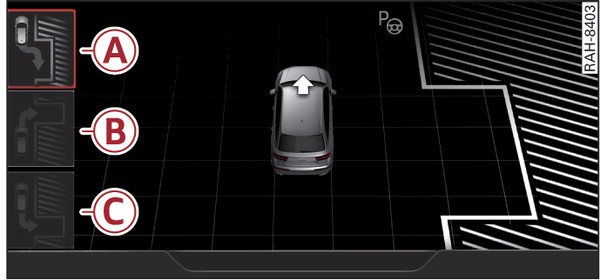
- Рис. 172 Система Infotainment: розпізнано паркувальне місце
Описано поздовжнє паркування. Поперечне паркування виконується аналогічно.
Передумова: для досягнення оптимального результату паркування відстань до ряду припаркованих автомобілів має становити біля 1 м.
Щоб перемикатися між режимами паралельного паркування -A-, перпендикулярного паркування переднім ходом -B- або перпендикулярного паркування заднім ходом -C-, повертайте регулятор до потрібної позиції. Система пропонуватиме тільки ті варіанти паркування, які наразі доступні.
Увімкніть вказівник повороту. Буде обстежено потрібний бік вулиці.
Для поздовжнього паркування рухайтеся вперед зі швидкістю не більше 30 км/год. Або...
Для поперечного паркування рухайтесь уперед зі швидкістю не більше 20 км/год.
Коли система знаходить паркувальне місце, воно відображається Рис. 172►. Переконайтеся, що знайдене паркувальне місце придатне для вашого автомобіля.
Під час паркування автомобіля за допомогою автопілота дотримуйтеся вказівок на дисплеї.
У разі перевищення порога швидкості близько 50 км/год паркувальний автопілот вимикається.
Паркувальний автопілот показує лише паркувальні місця, придатні для розташування автомобіля за довжиною й шириною.
Примітка
- Можна вибрати одну зі знайдених можливостей для паркування. Доступне паркувальне місце відображатиметься на дисплеї, доки воно знаходитиметься в радіусі розпізнавання його системою.
- Систему також можна активувати пізніше, повільно проїжджаючи повз придатного паркувального місця. Для цього натисніть кнопку
 і ввімкніть вказівник повороту.
і ввімкніть вказівник повороту.
- Залежно від увімкненого вказівника повороту буде відображено бік дороги справа або зліва.
- Найкращий результат можна отримати, якщо ваш автомобіль рухається максимально паралельно до припаркованих автомобілів або краю дороги.
- Якщо придатні паркувальні місця існують одночасно з двох боків дороги, наприклад на вулиці з одностороннім рухом, то можна вибрати інший вказівник повороту та скористатися паркувальним автопілотом.